E.Str.A.D.A. - Studenti
UNITA' 2: IL CALCOLO DELLE REAZIONI VINCOLARI
Ing. Paolo Rugarli
L’equilibrio č indiscutibilmente una condizione molto particolare. Esso si realizza, per un corpo monolitico, rispetto ad un certo sistema di riferimento piano, quando la somma di tutte le forze orizzontali č nulla, la somma di tutte le forze verticali č nulla e quando č nulla la somma di tutti i momenti rispetto ad un punto qualsiasi del piano. Se tutte queste condizioni sono verificate, nessuna esclusa, allora il corpo resta in equilibrio.
Sul concetto di “momento”, meno intuitivo di quello di forza, vale la pena di dire due parole: il momento č ciň che provoca nei corpi la tendenza a ruotare. Forze eguali possono dare, a seconda di come sono collocate, momenti diversi. Il momento di una forza rispetto ad un punto (traccia di un asse normale al piano della struttura piana in esame), si ottiene moltiplicando la forza per la distanza della retta di applicazione della forza dal punto considerato (braccio). Momento eguale a forza per bracccio.
Dunque ora sappiamo come decidere se un corpo č in equilibrio o no. Basta fare la somma di tutte le forze orizzontali, la somma di tutte quelle verticali, la somma di tutti i momenti rispetto ad un punto, e controllare che tutte le somme risultanti ( o brevemente le risultanti) siano nulle. In termini piů generali, basta che il momento risultante rispetto a tre punti distinti propri od impropri sia nullo.
La situazione che abbiamo rappresentato č una situazione ideale. Nella realtŕ fisica i corpi sono attaccati a vincoli, ed č spesso grazie a questi che l’equilibrio si realizza. Chiediamoci dunque qual č il ruolo dei vincoli. Certo non tireremo in ballo, ora che abbiamo elencato delle chiare condizioni meccaniche come l’annullarsi di quantitŕ misurabili, fluidi metafisici o elementi chiromantici. Manteniamo le leggi giŕ formulate e concludiamo cosě: se su un corpo sono applicate delle forze e quel corpo č vincolato, il corpo č in equilibrio se e solo se i vincoli (re)agiscono sul corpo con delle forze e delle coppie, che chiameremo reazioni vincolari, proprio tali da annullare tutte le risultanti. Se cambiamo le forze applicate, i vincoli continuano ad agire impedendo al corpo di muoversi, semplicemente cambiando le reazioni vincolari. I vincoli si comportano dunque come se sapessero cosa la statica chiede loro: “calcolano” le reazioni che servono e le applicano al corpo che vogliono bloccare.
La conoscenza delle reazioni vincolari č fondamenale per due ragioni. La prima č che solo sostituendo ai vincoli le loro reazioni, noi abbiamo il quadro complessivo delle forze e delle coppie attive e reattive presenti su un corpo. La seconda č che, per il noto principio di azione e reazione, anche sui vincoli finiscono delle azioni (sono le reazioni vincolari cambiate di segno), e queste azioni possono provocare, in certi casi, la rottura o il cedimento del vincolo, condizione questa sempre interessante per chi progetta sistemi resistenti.
Ci si para allora di fronte il seguente problema: come calcolare le reazioni vincolari?
Affronteremo il problema in due passi. Nel primo passo ci occuperemo di sistemi formati da un solo corpo internamente privo di svincoli. Nel secondo passo ci occuperemo dei sistemi articolati.
Immaginiamo allora un’asta (una sola senza svincoli, per ora) soggetta a certe forze e certe coppie, e vincolata ad un riferimento. Come abbiamo visto noi possiamo sostituire ai vincoli le reazioni da essi esercitate, pur di calcolarle in modo che garantiscano il soddisfacimento di tutte le condizioni di equilibrio (tutte e tre le risultanti devono essere nulle). Poiché tre sono le condizioni di equilibrio da scrivere, tre al massimo possono essere le incognite, anzi, le incognite devono essere proprio tre. Infatti: se sono piů di tre il problema č iperstatico, ed allora non bastano le condizioni di equilibrio per risolvere il compito; se sono meno di tre il problema č ipostatico ed allora i vincoli non sono in numero sufficiente a impedire il movimento; se sono proprio tre il problema č isostatico e dunque, se la struttura non č labile, puň essere risolto con le sole equazioni di equilibrio.
Il nostro compito si riduce quindi ai seguenti passi.
1. Eliminare i vincoli e mettere al loro posto le reazioni vincolari incognite, chiamandole con un simbolo di incognita che piů ci piace.
2. Scrivere tre distinte ed indipendenti condizioni di equilibrio utilizzando le forze applicate e le reazioni incognite come se fossero note.
3. Risolvere il sistema di tre equazioni in tre incognite, calcolando cosě le reazioni vincolari.
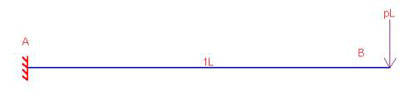
Per fissare le idee consideriamo qualche esempio. Immaginiamo una mensola di luce L, soggetta ad una forza verticale F all’estremo libero. Lŕ dove vi č l’incastro vi sono tre reazioni vincolari incognite: la forza verticale V (positiva verso l’alto), la forza orizzontale H (positiva verso destra), il momento M (positivo se antiorario). Poiché deve esserci equilibrio, deve risultare
Dove la prima equazione indica l’equilibrio alla traslazione orizzontale (somma di tutte le forze orizzontali nulla), la seconda l’equilibrio alla traslazione verticale (somma di tutte le forze verticali nulla), la terza l’equilibrio alla rotazione rispetto al punto A ove č messo l’incastro (somma di tutti i momenti rispetto ad A nulla). La scelta del punto rispetto al quale calcolare il momento č arbitraria. Se avessimo preso l’estremo libero B, avremmo scritto il sistema:
E’ facile vedere che in tutti e due i casi otteniamo la stessa soluzione:
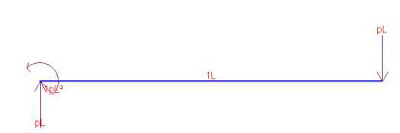
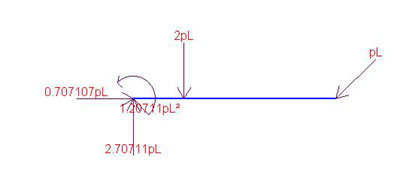
Se lo stesso elemento fosse stato caricato in un altro modo, piů complesso, come in figura, avremmo scritto (facendo l’equilibrio alla rotazione intorno ad A):
H-pLcos(45)=0
V-2pL-pLsin(45)=0
M-2pLx(L/4)-pLsin(45)L=0
Ottenendo la soluzione
V=(2+Ö2/2)pL
H=(Ö2/2)pL
M=(+Ö2/2+1/2)pL2
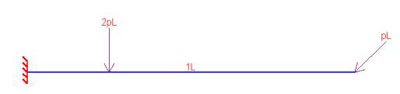
Per quante forze e coppie si mettano sulla struttura, se questa va a terra con solo tre vincoli basta scrivere un sistema di tre equazioni in tre incognite per risolvere la questione. Consideriamo ancora un esempio.
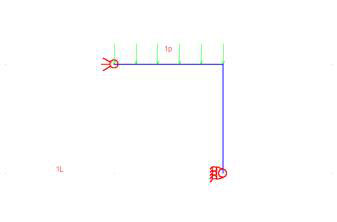
Qui la struttura va a terra con una cerniera ed un carrello. Nella cerniera vi sono le due reazioni incognite H e V (positive con le solite convenzioni), nel carrello vi č la incognita R, che č diretta come la normale al piano di scorrimento (se il carrello fosse inclinato anche la reazione sarebbe conseguentemente inclinata). Il carico distribuito “p” ha per risultante “p” per la lunghezza del tratto di asta a cui č applicato, “L”. Ai fini del calcolo del momento si puň immaginare la risultante di questo carico applicata a metŕ del tratto caricato. Allora gli equilibri si scrivono (la rotazione č immaginata rispetto alla cerniera):
Ovvero:
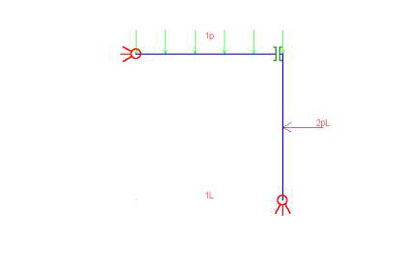
Nel sostituire ai vincoli le reazioni da essi esercitate occorre tenere presenti quali sono i movimenti impediti e, in corrispondenza ad essi, mettere le azioni. Per esempio ad un pattino si sostituisce una coppia reattiva ed una forza reattiva diretta normalmente al piano di scorrimento.
Anche se la struttura č composta da piů aste, ma va a terra con soli tre vincoli (in quanto cinematicamente assimilabile ad un’asta unica), si segue lo stesso procedimento qui delineato.
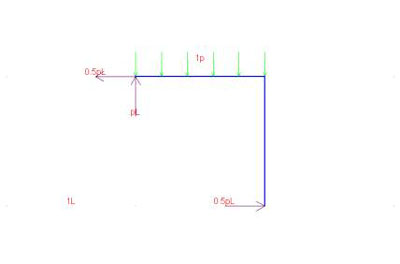
In questo esempio il calcolo delle reazioni vincolari si fa cosě (chiamiamo R la reazione del carrello in alto, S quella del carrello in basso a sinistra, D quella del carrello in basso a destra, e facciamo l’equilibrio alla rotazione intorno al punto che corrisponde al carrello in alto):
Ottenendo:
S=0.5pL
D=-0.5pL
R=-0.5pL
Passiamo ora ad esaminare un caso un po’ piů complesso, il caso in cui la struttura vada a terra con piů di tre vincoli, come accade, ad esempio, in un arco a tre cerniere.
Ad un primo esame si potrebbe credere che questo caso non sia risolvibile con le sole equazioni di equilibrio, dato che gli equilibri sono tre ed i vincoli quattro.
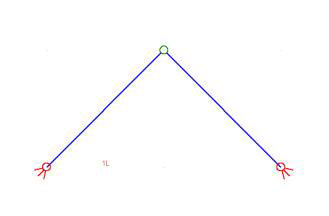
In realtŕ se č vero che esiste un vincolo a terra in piů rispetto ai casi precedenti, esiste anche un movimento possibile in piů: l’arco a tre cerniere non č fatto con un’unica asta, ma con due aste incernierate tra loro: č un sistema articolato. Le aste, in generale, possono dunque ruotare (se la cerniera č in un punto proprio, traslare se č in un punto improprio) l’una rispetto all’altra, e l’imposizione della impossibilitŕ di ruotare una rispetto all’altra costituisce proprio la equazione in piů che ci serve per determinare la incognita in piů.
Se una struttura č composta da piů aste vincolate tra loro, oltre ai tre equilibri assoluti, quelli della intera struttura rispetto al sistema di riferimento, occorre tenere in conto un certo numero di equilibri relativi, vale a dire equilibri di una parte rispetto ad un’altra. Il numero di equilibri relativi sommato al numero di equilibri assoluti deve eguagliare il numero di reazioni vincolari incognite, in modo da consentire la scrittura di un sistema di equazioni ben posto (tante equazioni quante incognite).
Se vogliamo scrivere l’equilibrio alla rotazione dell’asta A rispetto all’asta B, incernierate in O, scriveremo che la somma di tutti i momenti, calcolati rispetto al punto O, delle azioni applicate sull’asta A deve essere nulla. Allo stesso modo potremmo invece scrivere che la somma di tutti i momenti rispetto ad O delle azioni applicate sull’asta B deve essere nulla. Le due condizioni significano entrambe che l'asta A non puň ruotare rispetto all’asta B, e viceversa.
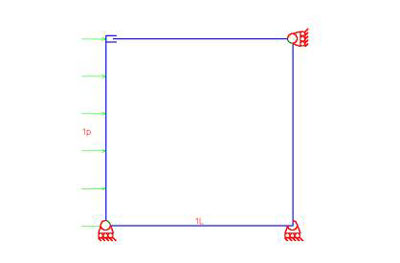
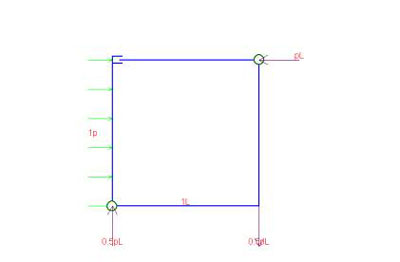
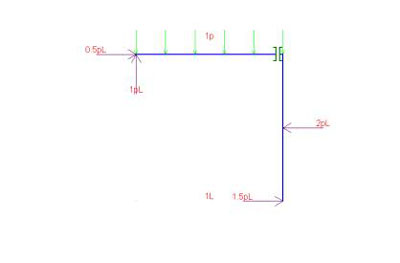
Si consideri ad esempio la seguente struttura, che va a terra con quattro vincoli.
Conveniamo di chiamare H e V le reazioni della cerniera in alto a sinistra, S e T le reazioni orizzontale e verticale della cerniera in basso a destra. Le tre equazioni di equilibrio globale, alla traslazione orizzontale, quella verticale, ed alla rotazione intorno ad esempio alla cerniera in alto, si scrivono:
H+S-2pL=0
V+T-pL=0
-pL(L/2)-2pL(L/2)+SL+TL=0
Come si vede questo sistema non č risolvibile perché ha tre equazioni e quattro incognite (H, V, S, T). Perň le due aste, oltre a non ruotare assieme rispetto al punto scelto, non devono ruotare l’una rispetto all’altra, cioč la somma dei momenti delle azioni presenti su un’asta, calcolati rispetto alla cerniera in comune, deve essere nulla. Pertanto, se scriviamo che l’asta verticale non ruota, scriviamo:
SL-2pL(L/2)=0
Questa equazione č l’equazione mancante, cosě il sisteme diviene:
H+S-2pL=0
V+T-pL=0
-pL(L/2)-2pL(L/2)+SL+TL=0
SL-2pL(L/2)=0
E’ da notare che si sarebbe potuto scrivere, equivalentemente, che l’asta orizzontale non deve ruotare rispetto all’asta verticale. In questo caso il sistema sarebbe stato
H+S-2pL=0
V+T-pL=0
-pL(L/2)-2pL(L/2)+SL+TL=0
-VL+pL(L/2)=0
E’ facile vedere che i due sistemi ammettono la stessa soluzione (in quanto le ultime due equazioni, pur essendo diverse, sono analiticamente e staticamente equivalenti):
H=pL
V=0.5pL
S=pL
T=0.5pL
Generalizzando l’esempio visto, possiamo dire che se una struttura č isostatica e non labile, č sempre possibile calcolare tutte le reazioni vincolari, pur di scrivere un opportuno numero di condizioni di equilibrio tra loro indipendenti, le quali si possono riferire, in generale, sia al movimento della struttura nel suo complesso (equilibri globali) sia al movimento di una parte della struttura rispetto ad un'altra (equilibrio locale o relativo), scegliendo tra i movimenti resi possibili dagli svincoli interni alla struttura.
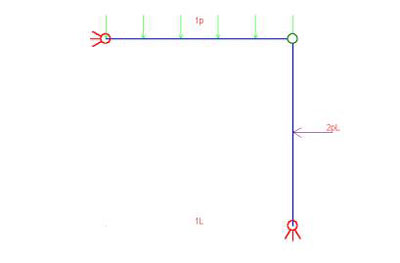
Grazie agli equilibri locali spesso si riesce immediatamente a trovare una reazione, e di seguito le altre. Per esempio, se la struttura fosse stata questa
si sarebbe subito potuto dire che V=pL, analizzando il fatto che l’asta orizzontale non deve traslare verticalmente rispetto a quella verticale. Allora per l’equilibrio verticale globale certamente deve essere T=0. Facendo l’equilibrio alla rotazione intorno alla cerniera a terra in alto, risulta (T č nulla, abbiamo detto)
SL-pL(L/2)-2pL(L/2)=0
Ovvero S=3pL/2. Resta l’equilibrio orizzontale
S+H-2pL=0
E quindi
H=pL/2